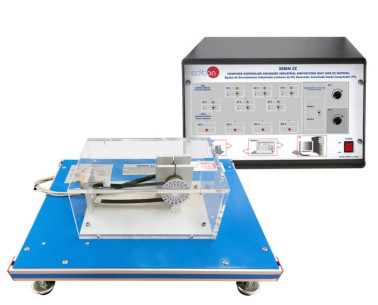
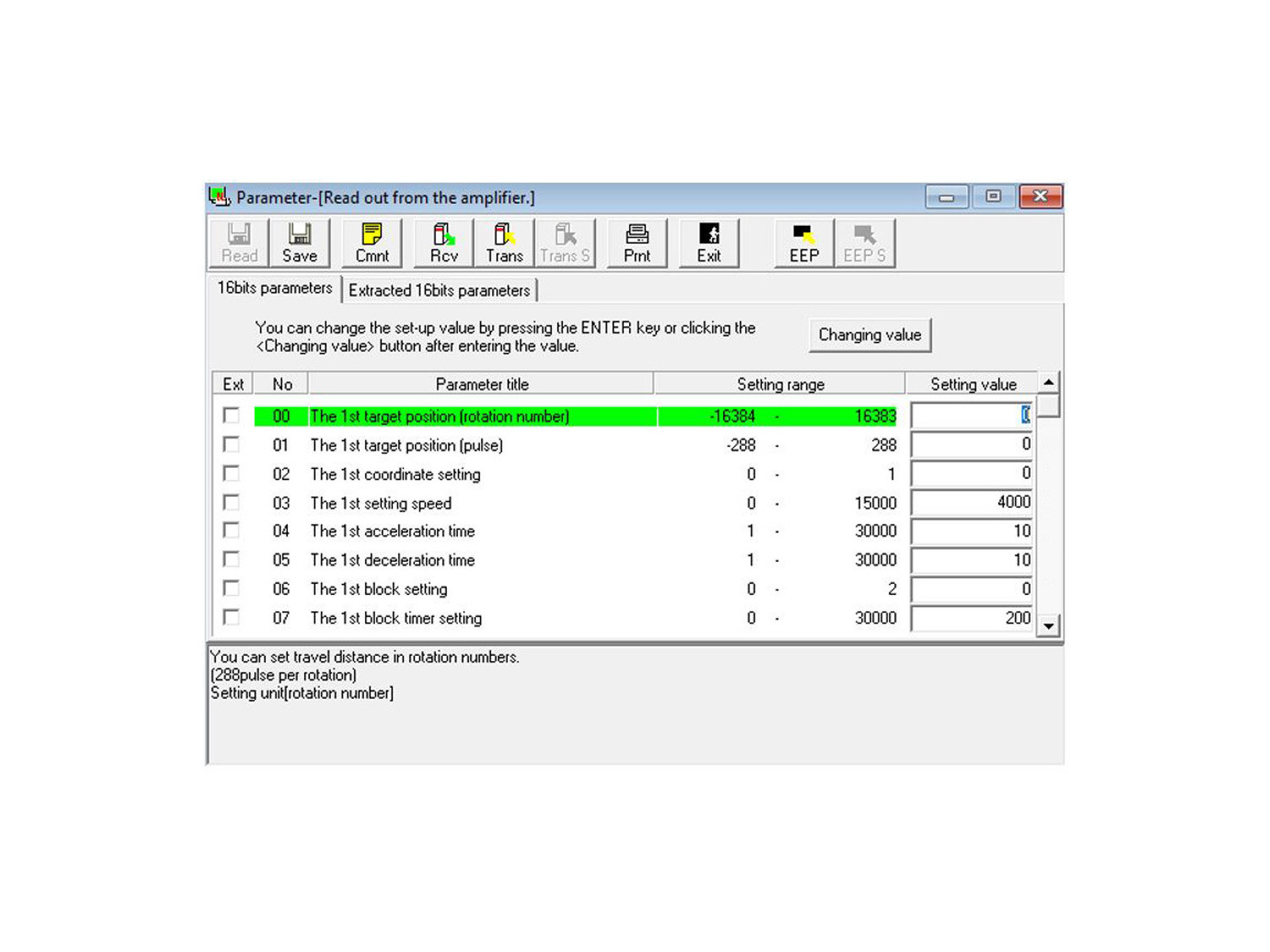
La Aplicación Industrial de Motores sin Escobillas, "AE-BMI", ha sido diseñada para realizar el control más común utilizado en la industria: el control de posición. La aplicación "AE-BMI" permite al estudiante configurar hasta cuatro posiciones con todos los parámetros relacionados cuando el sistema tiene que alcanzar cada una de estas posiciones: posicionamiento relativo o absoluto, valor de velocidad, aceleración y desaceleración del sistema cuando se acerca a la posición deseada, la señal de entrada digital para activar cada posición, ajuste de la posición inicial, etc.
La configuración se realiza a través del software del driver que controla el motor. Al ser el "AE-BMI" un sistema computarizado, además de utilizar el ordenador para configurar los parámetros de movimiento, permite visualizar el estado de las señales digitales de entrada y salida, la respuesta de la velocidad del motor, el estado de las alarmas, el valor del par, etc.
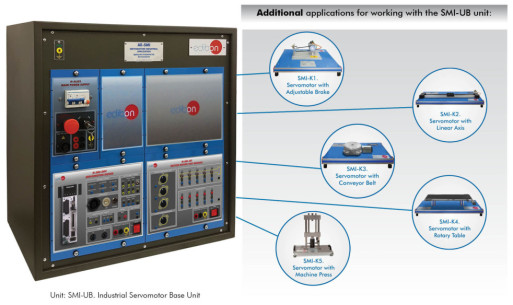
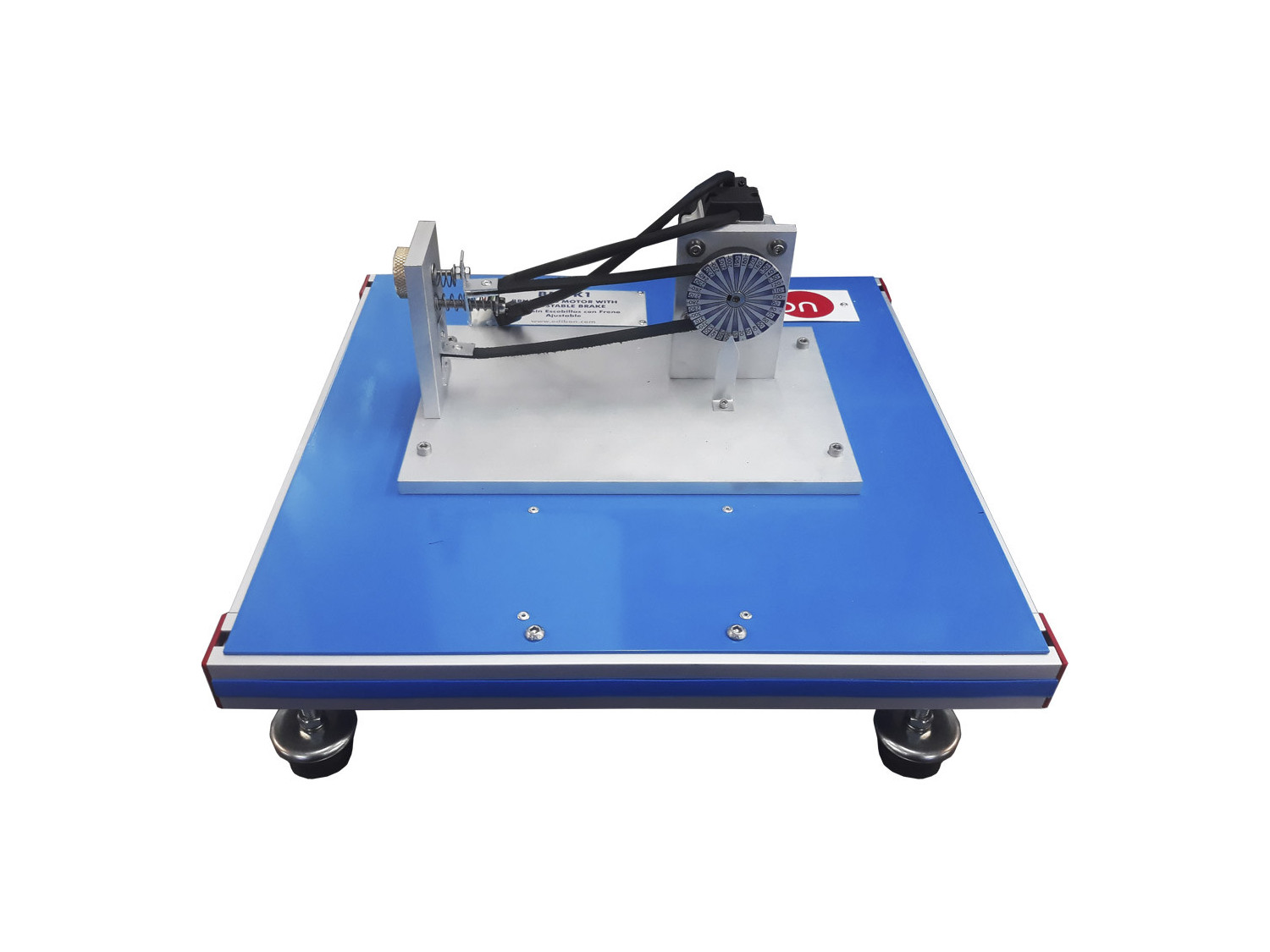
"BMI-UB" es la unidad base del "AE-BMI". Para trabajar con el "BMI-UB" son necesarios otros elementos requeridos. Los elementos requeridos disponibles son ejemplos reales de sistemas de control de movimiento: servomotor con freno ajustable y servomotor con sistema de eje lineal. La unidad base incluye el driver, el sistema de control, para controlar el motor incluido en la aplicación adicional.
La "AE-BMI" también puede trabajar con un controlador lógico programable, PLC. El PLC recibe las señales de los diferentes sensores instalados en cada aplicación adicional y controla el sistema de motor sin escobillas a través de señales digitales y pulsadas, lo que permite añadir un control PLC a un sistema de motor sin escobillas.
 Preferencias sobre cookies
Preferencias sobre cookies










 Catálogo
Catálogo
 Especificaciones de Concurso
Especificaciones de Concurso









{kind=link}
{kind=link}
{kind=link}
{kind=link}