La Aplicación Industrial de Servomotores, "AE-SMI", ha sido diseñada para realizar hasta siete controles utilizados en tecnología de movimiento: control de posición, control de velocidad, control de par, control de velocidad y posición, control de velocidad y par y control de cierre total (control de par, velocidad y posición al mismo tiempo). La aplicación "AE-SMI" permite configurar todos los parámetros involucrados en estos controles, tales como ajustar los parámetros de control PID, realizar un autoajuste de los parámetros de control, ajustar el límite de par, ajustar el límite de velocidad, establecer el tipo de señal de control de entrada, configurar alarmas, establecer la posición de inicio, la aceleración y desaceleración del sistema cuando se acerca a la posición deseada, el punto de torque o velocidad y un largo etcétera.
"AE-SMI" es un sistema computarizado, el PC se utiliza para configurar y monitorizar la respuesta y el estado del sistema de control del servomotor, lo que permite visualizar la posición actual, la velocidad y el valor del par y la velocidad en un gráfico personalizable dependiente del tiempo, el estado de las señales de entrada y salida digitales y analógicas, el tipo de control elegido, etc.
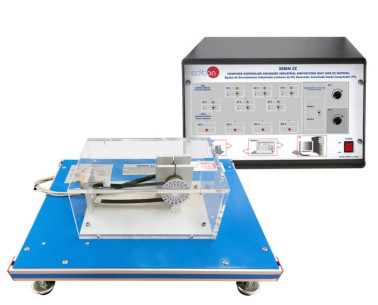
"SMI-UB" es la unidad base del "AE-SMI". Hay disponible una amplia gama de aplicaciones adicionales, de las cuales se requiere al menos una para trabajar con el "SMI-UB". Las aplicaciones adicionales disponibles son ejemplos reales de los sistemas de la industria: servomotor con freno ajustable, servomotor en un sistema de eje lineal, servomotor en un sistema de cinta transportadora, servomotor en un sistema de mesa giratoria y servomotor en una máquina de prensado.
El "SMI-UB" también permite trabajar con un controlador lógico programable, PLC. El PLC recibe las señales de los diferentes sensores instalados en cada aplicación adicional y controla el servosistema a través de señales digitales y pulsadas, lo que permite agregar un controlador PLC a un sistema de servomotor.
 Preferencias sobre cookies
Preferencias sobre cookies

 Catálogo
Catálogo
 Especificaciones de Concurso
Especificaciones de Concurso