El Equipo de Servosistemas Industriales (motores de CC) Avanzado, Controlado desde Computador (PC), "SERIN/CC", ha sido diseñado por EDIBON para permitir diferentes prácticas relacionadas con los servomotores. El equipo tiene diferentes módulos para desarrollar diferentes experimentos. Los módulos incluidos en el sistema "SERIN/CC" son:
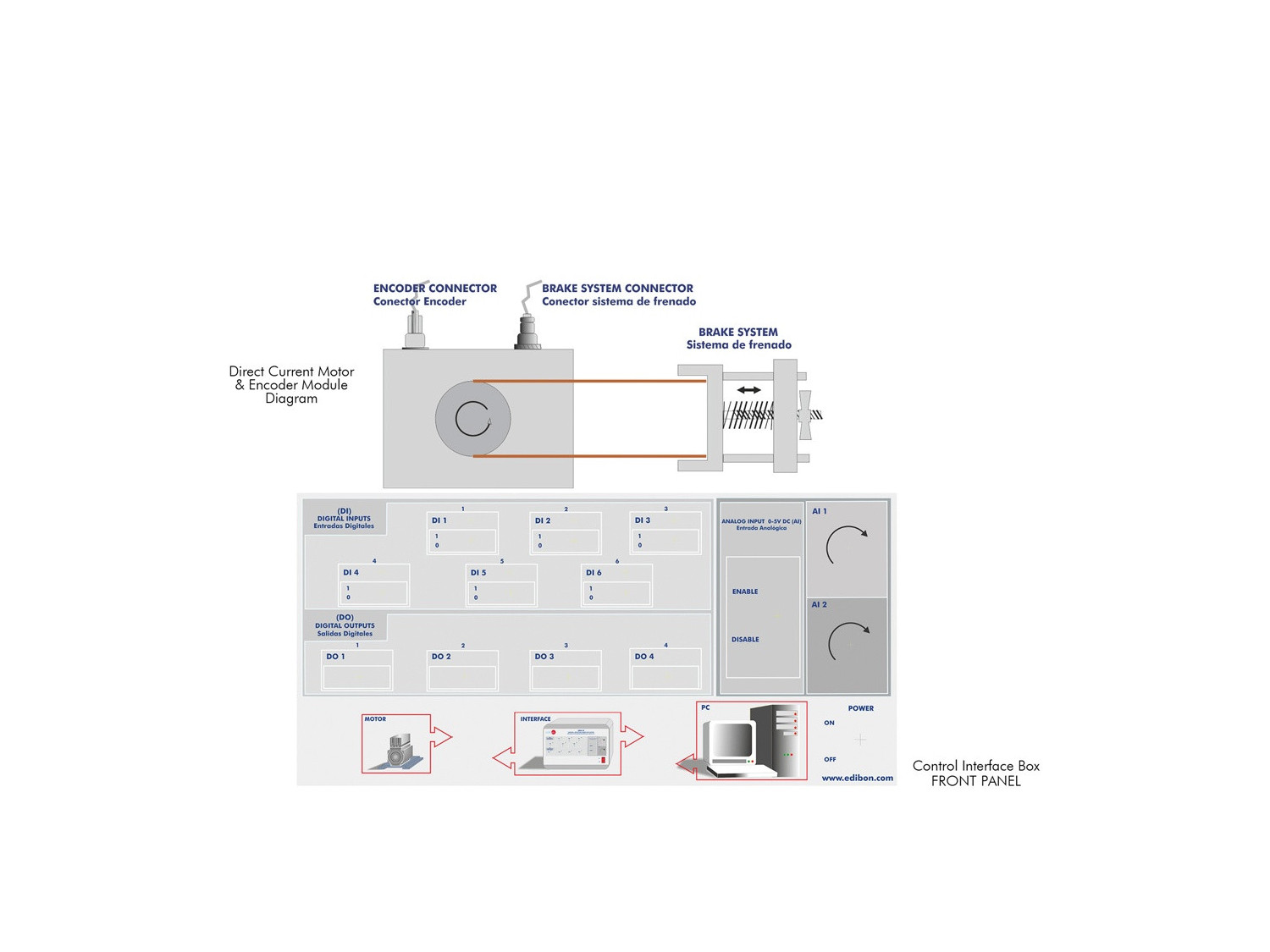
- Entradas y salidas digitales: el equipo contiene 6 entradas digitales y 4 salidas digitales. Las entradas digitales se pueden usar para arrancar diferentes funciones estándar definidas, así como perfiles de movimiento definidos. Las salidas digitales dan toda la información necesaria acerca del estado del movimiento.
- Entradas analógicas: el equipo tiene dos entradas analógicas que pueden ser habilitadas o deshabilitadas utilizando el interruptor. Tienen un rango de tensión de 0-5Vdc y constan de una resolución de 10 bits.
- Motor CC: el motor está conectado a un freno tensor que puede ser utilizado para cargar el motor.
La caja-interface tiene un servomecanismo controlador para motores CC que controla la velocidad, posición y corriente del motor. Para realizar este control de realimentación se utiliza un codificador de pulsos.
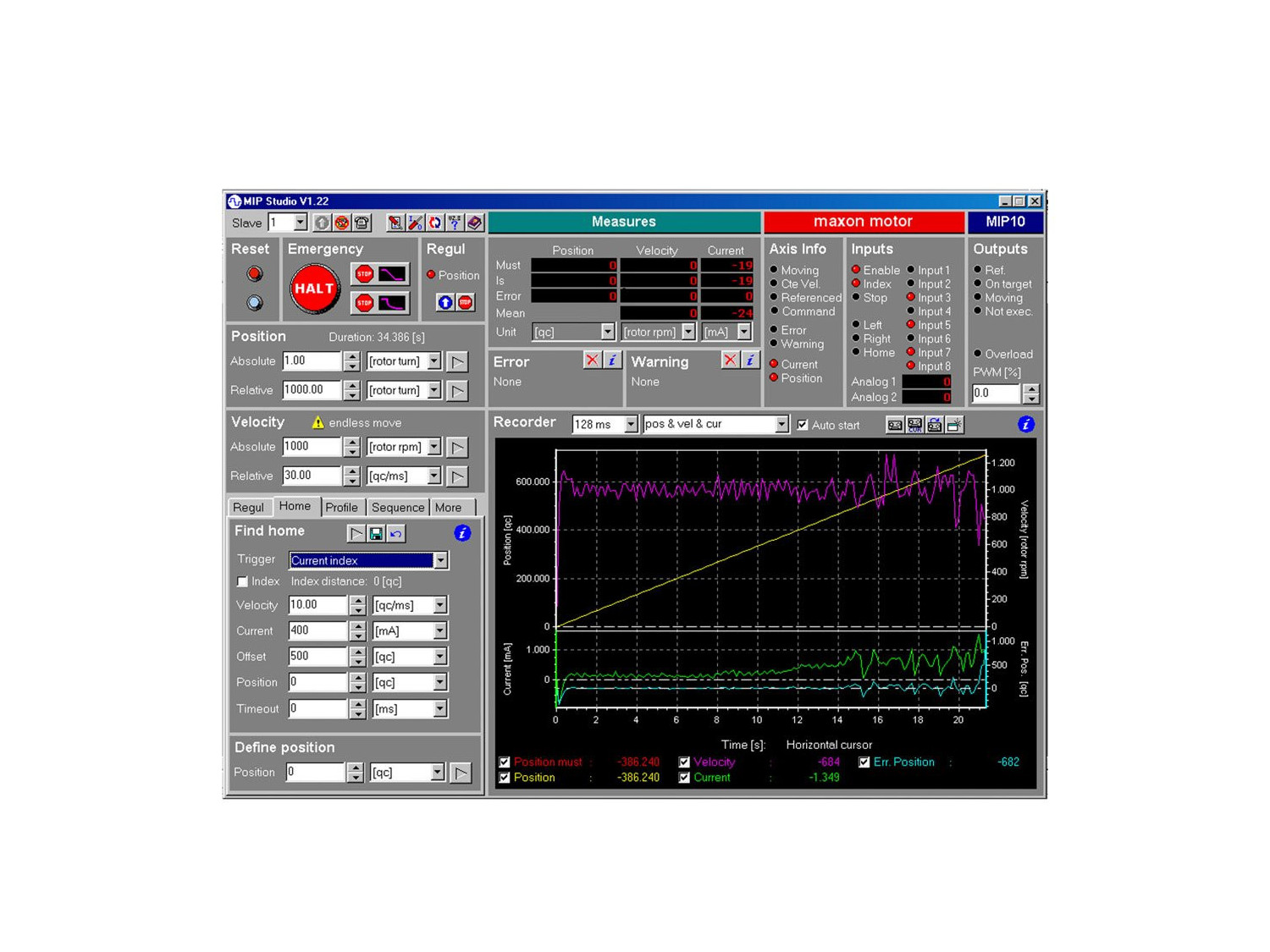
La comunicación RS232 entre la caja-interface y el ordenador ofrece al equipo "SERIN/CC" la posibilidad de controlar el motor desde el ordenador y visualizar las señales más importantes del motor.
El servomecanismo controlador de 4 cuadrantes controla el funcionamiento del motor y del frenado en ambas direcciones de rotación, en el sentido de las agujas del reloj y en el sentido contrario a las agujas del reloj, para un correcto posicionamiento.
El controlador es un modulador por ancho de pulso (PWM) en el que el controlador enciende y apaga el motor muchas veces por segundo (varias decenas de miles de veces). Si el intervalo de encendido es más largo, el motor gana velocidad, pero si el intervalo de encendido es más corto, el motor pierde velocidad. El valor medio decisivo del voltaje cambia en relación al tiempo-on-off en un ciclo de la señal PWM. Este tipo de control tiene una mayor eficiencia y sólo un mínimo de energía se convierte en calor.
Hay tres tipos de controles realizados por el controlador:
- Control de velocidad: La función de velocidad del servomecanismo amplificador es preservar la velocidad constante del motor e independiente de cambios de carga. Para ello el punto de ajuste (velocidad deseada) es continuamente comparado con el valor real (velocidad real) en el control electrónico del servomecanismo del amplificador. La diferencia del controlador determinada de esta forma es utilizada por el controlador para regular el ancho del pulso del servoamplificador de tal forma que el motor reduce la diferencia del controlador. Esto representa un circuito de regulación de velocidad en lazo cerrado.
- Control de posición: El control de posición asegura la concordancia entre la posición que se obtiene de la medición de corriente y la posición objetivo, proporcionando al motor los correspondientes valores de corrección, tal y como hace el controlador de velocidad. Esta posición suele obtenerse de un codificador digital.
- Control de corriente o de torque: El control de corriente proporciona al motor una corriente proporcional al punto de ajuste. Por consiguiente el par del motor cambia proporcionalmente al punto del ajuste. El controlador de corriente también mejora la dinámica de un posicionamiento superior o circuito de control de velocidad.
El motor está equipado con un codificador digital que proporciona 500 pulsos por revolución. La dirección de giro es detectada con los pulsos cuadrados de los canales A y B a través de un offset de 90 grados eléctricos.
El codificador digital se usa en el control de posición para derivar y medir el desplazamiento o ángulo.
El codificador proporciona una señal cuadrada simple para procesar más en profundidad el sistema de control. Sus impulsos se pueden contar para su posicionamiento exacto o determinar la velocidad. Los canales A y B generan señales desfasadas, que se comparan para determinar la dirección de rotación.
El pulso denominado "home" (canal I) proporciona un paso por cero y se usa como punto de referencia para determinar de forma precisa el ángulo de rotación.
El codificador del equipo "SERIN/CC" evalúa los flancos de subida y de bajada de la señal. En consideración con el número de pulsos del codificador, este resultado nos da un posicionamiento cuatro veces más preciso.
 Preferencias sobre cookies
Preferencias sobre cookies
 - SERIN/CC")


 - SERIN/CC")


 Catálogo
Catálogo
 Especificaciones de Concurso
Especificaciones de Concurso













 - SERIN/CC")
{kind=link}
{kind=link}