 Preferencias sobre cookies
Preferencias sobre cookies
Su selección
No hay más artículos seleccionados

 Catálogo
Catálogo
 Especificaciones de Concurso
Especificaciones de Concurso

- AE-SCA
Disponible
6.2.5.5.- APLICACIONES DE ESTACIONES DE TRABAJO ROBÓTICAS
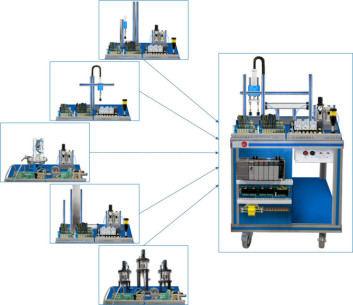
AE-SCA
Estación de Brazo Robótico SCARA
La "AE-SCA" es una estación de brazo robótico SCARA que incluye una consola de programación del brazo robótico. La "AE-SCA" contiene además un PLC que da órdenes a la pinza o taladro eléctricos.La "AE-SCA" puede realizar multitud de funciones...


