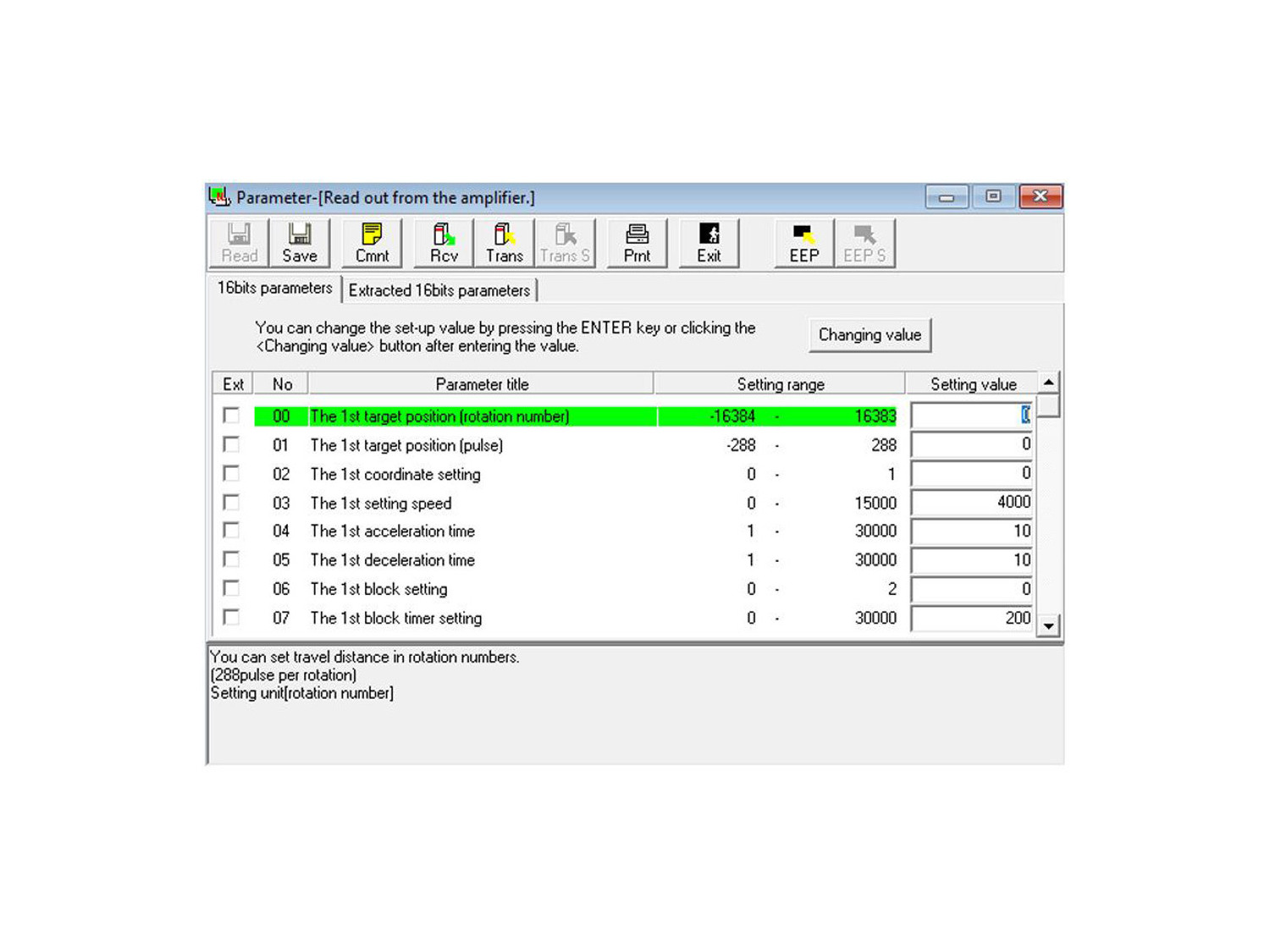
L’Application Industrielle de Moteur Sans Balais, "AE-BMI", a été conçu pour effectuer le contrôle le plus commun utilisé dans l’industrie : le contrôle de position. L’application "AE-BMI" permet à l’étudiant de configurer jusqu’à quatre positions avec tous les paramètres impliqués lorsque le système doit atteindre chacune de ces positions : positionnement relatif ou absolu, valeur de la vitesse, accélération et décélération du système lorsqu’il s’approche de la position désirée, signal d’entrée numérique pour activer chaque position, réglage de la position de repos, etc.
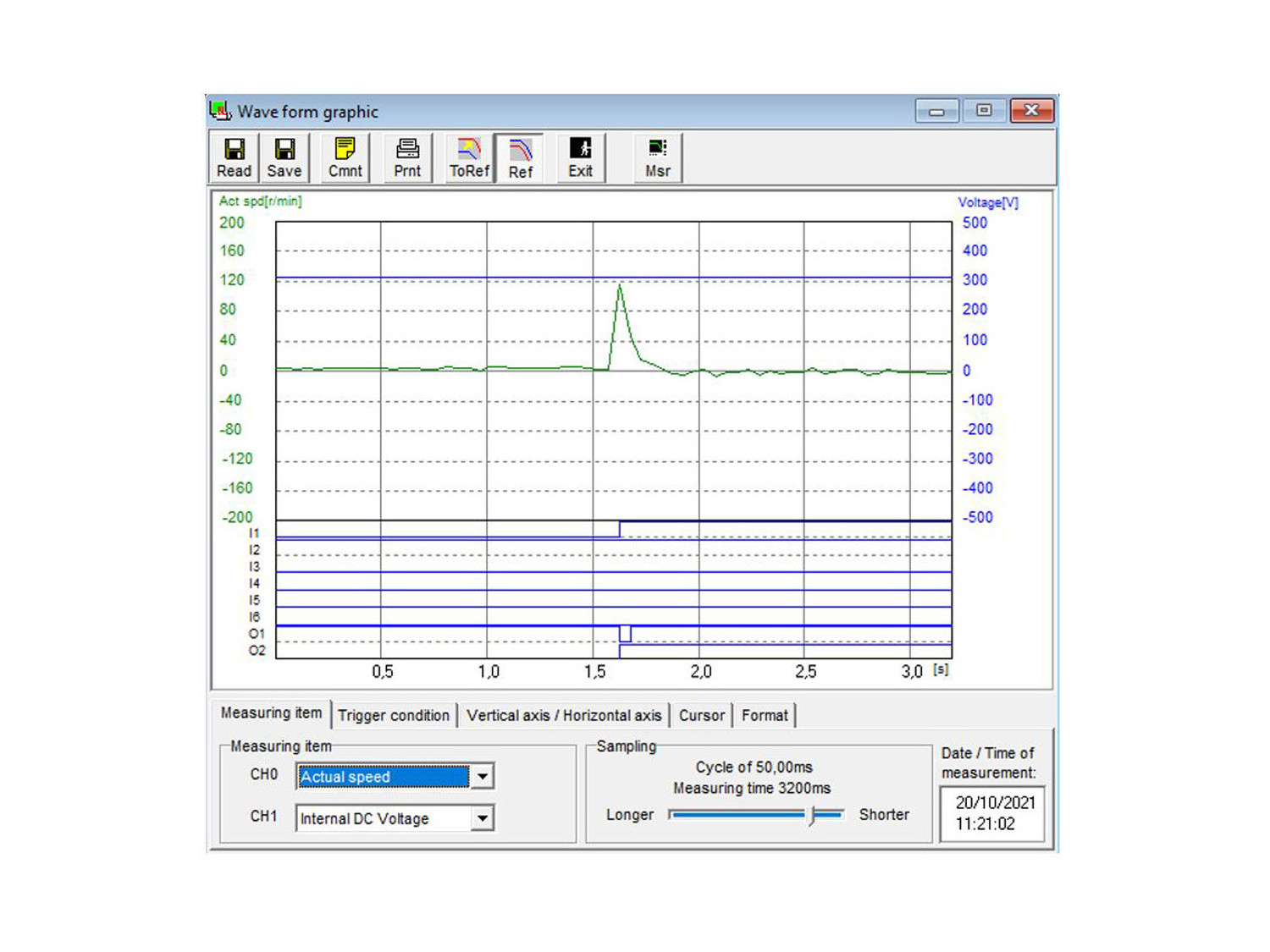
La configuration se fait par le biais du logiciel du pilote qui contrôle le moteur. Puisque "AE-BMI" est un système informatisé, en plus d’utiliser l’ordinateur pour configurer les paramètres du mouvement, il permet de visualiser l’état des signaux numériques d’entrée et de sortie, la réponse en vitesse du moteur, l’état des alarmes, la valeur du couple, etc.
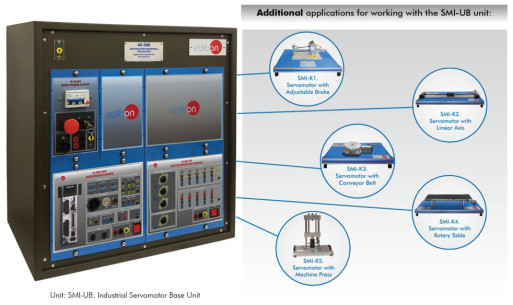
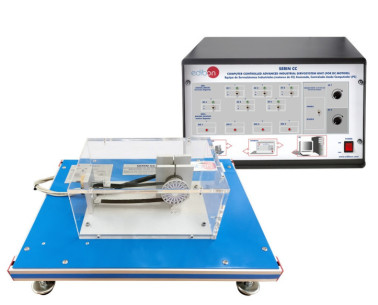
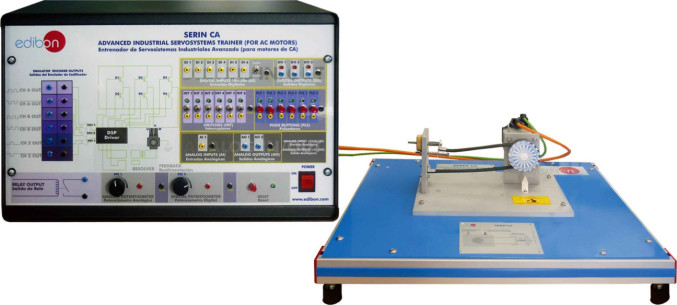
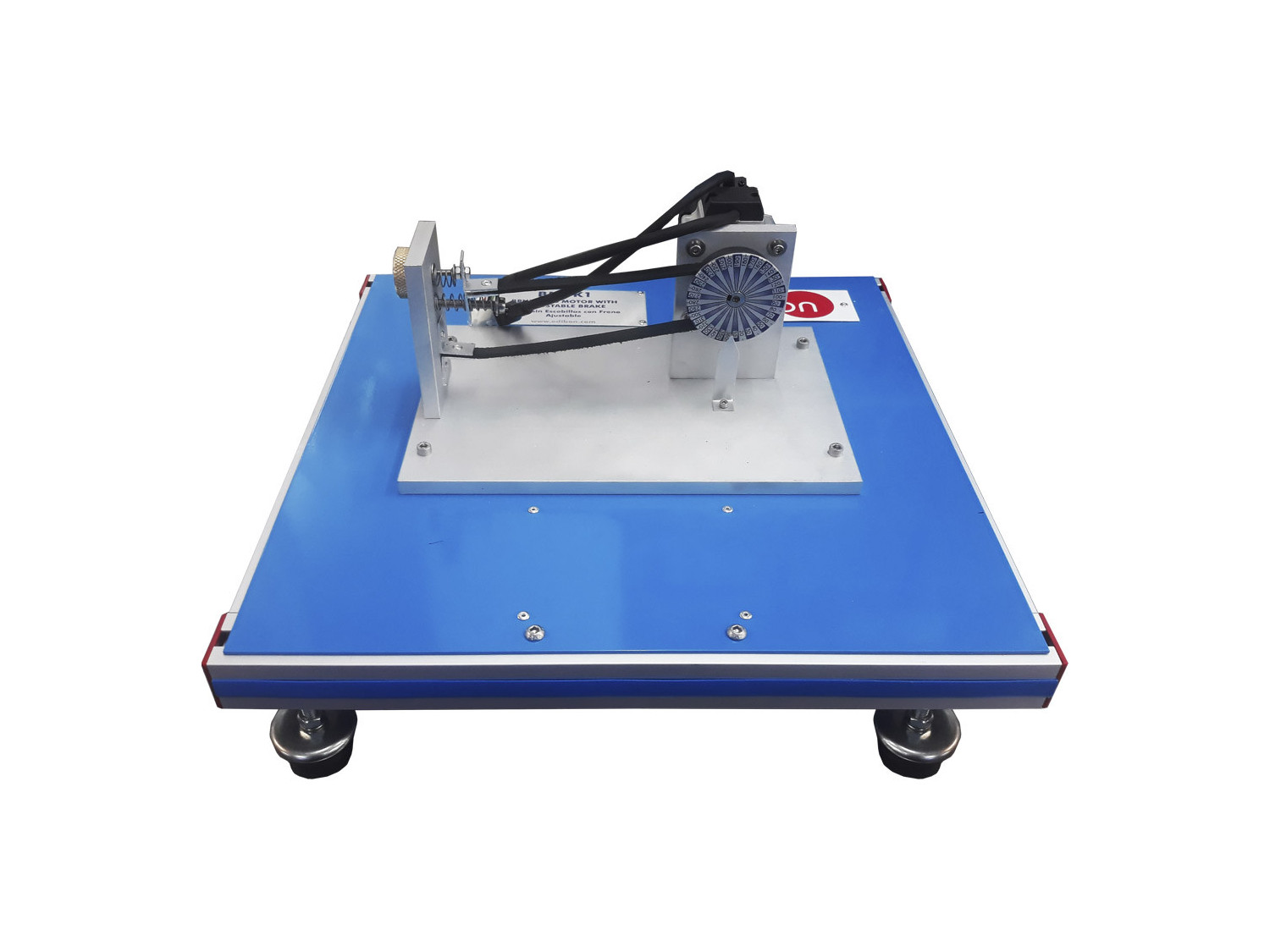
Le "BMI-UB" est l’unité de base du "AE-BMI". Pour travailler avec le "BMI-UB", d’autres éléments sont nécessaires. Les éléments requis disponibles sont des exemples réels de systèmes de contrôle du mouvement : un servomoteur avec frein réglable et un servomoteur avec système d’axe linéaire. L’unité de base comprend le pilote, le système de commande, pour contrôler le moteur inclus dans l’application supplémentaire.
Le "AE-BMI" permet également à l’étudiant de travailler avec un contrôleur logique programmable, PLC. Le PLC reçoit les signaux des différents capteurs installés dans chaque application supplémentaire et contrôle le système de moteur sans balai par le biais de signaux numériques et pulsés, permettant l’ajout d’un contrôle PLC à un système de moteur sans balai.
 Préférences sur les cookies
Préférences sur les cookies










 Catalogue
Catalogue
 Spécifications du Concours
Spécifications du Concours








{kind=link}
{kind=link}
{kind=link}
{kind=link}