Preferensi cookie
Preferensi cookie
Your cart
Keranjang belanja Anda kosong

 Katalog
Katalog
 Spesifikasi Kontes
Spesifikasi Kontes



- RYC
Available
6.1.1.1.- DASAR-DASAR TEORITIS-PRAKTIS
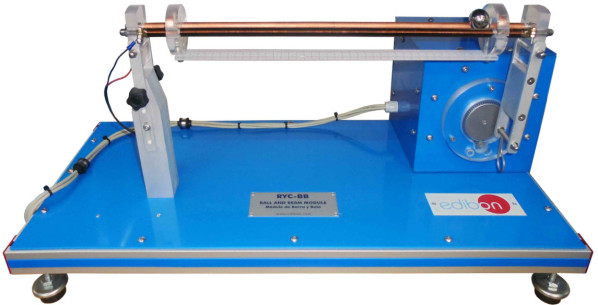
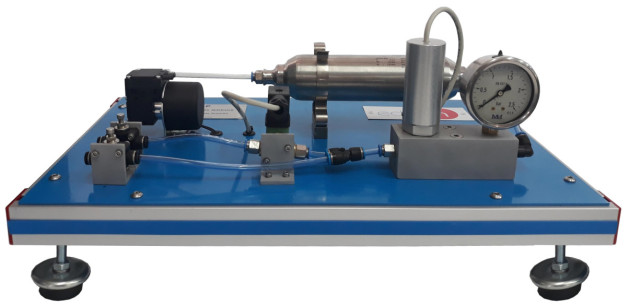
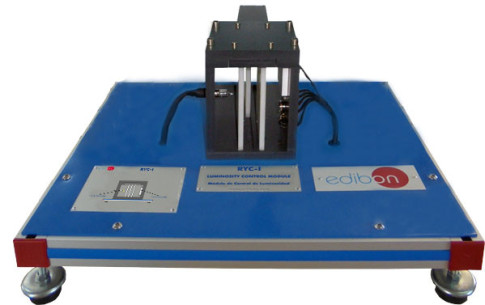
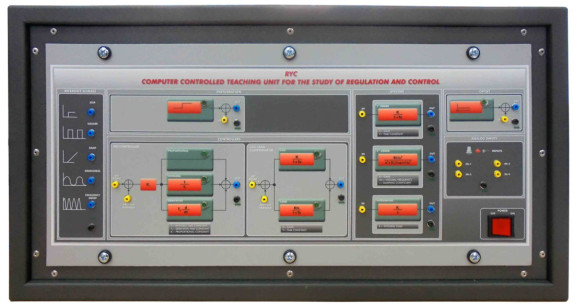
RYC
Unit Pembelajaran dengan Komputer Kontrol untuk Belajar Regulator dan Kontrol
Regulation and control theory is divided into two major divisions in, namely, classical and modern. The implementation of classical controller designs as compared to systems designed using modern control theory is easier and these controllers are...