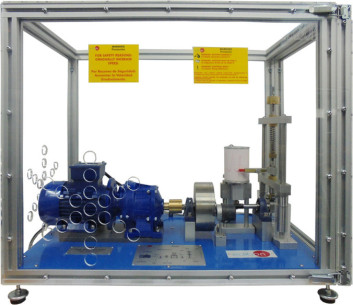
The Computer Controlled Balance of Reciprocating Masses Unit, "MBMRC", is a bench-mounting unit that allows to investigate and examine the free masses and moments of a reciprocating engine with a single cylinder, with two cylinders or with four cylinders.
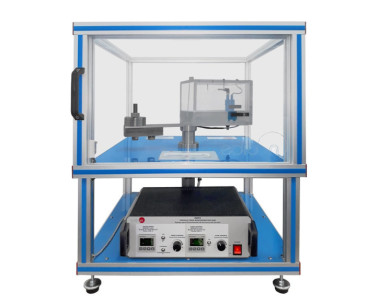
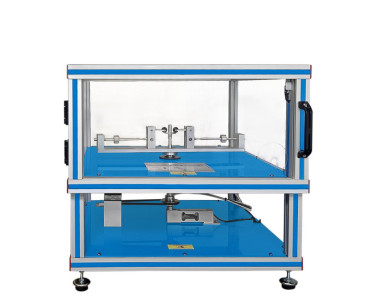
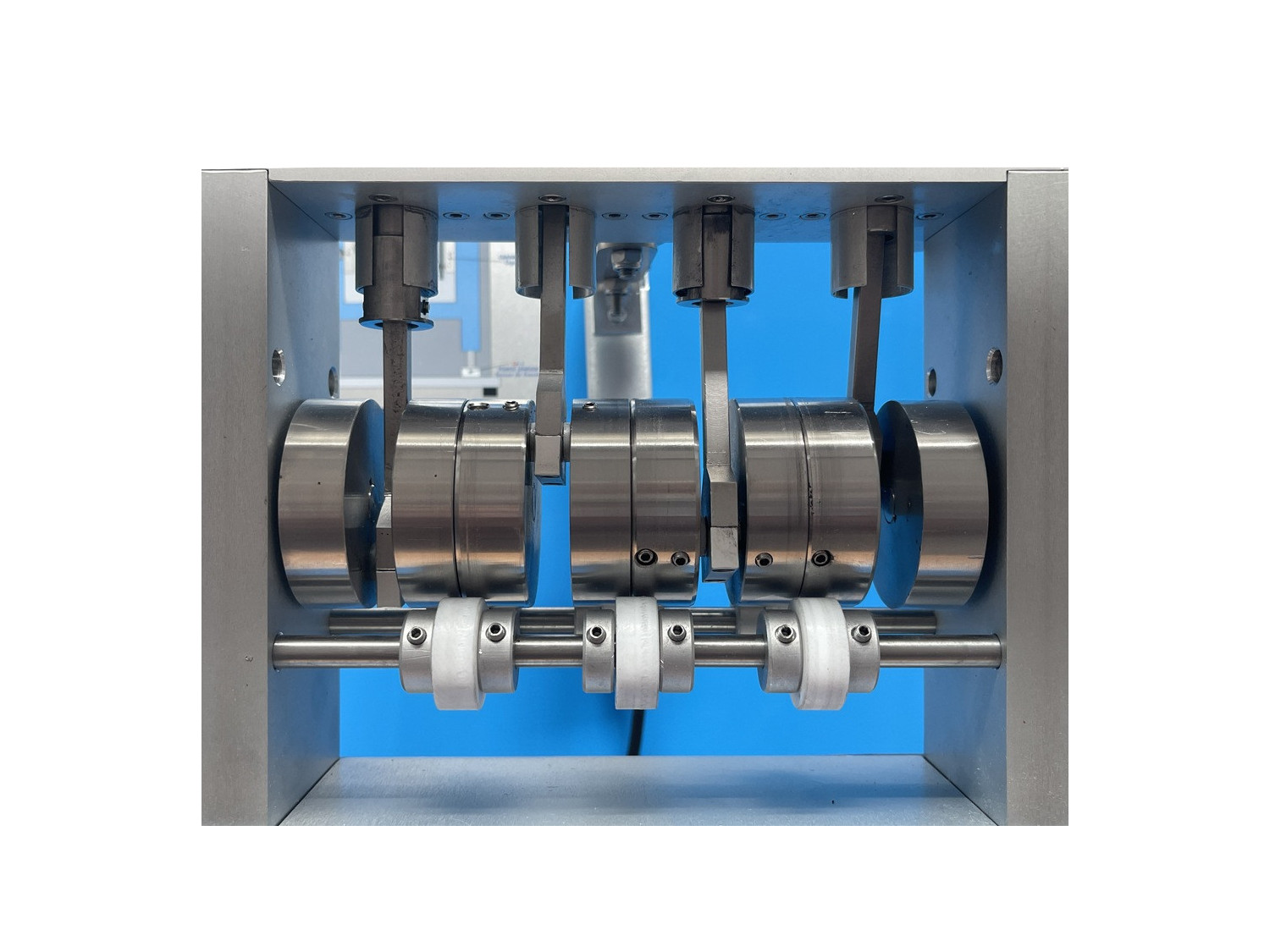
A robust frame bears a support that holds a model four-cylinder in-line engine. The model engine has a crankshaft, connecting rods, bearings, pistons and a cylinder block.
The crankshaft has adjustable sections and the students can rotate each section relative to the others to change the crank angles. For each cylinder, the angle between cranks can be adjusted continuously.
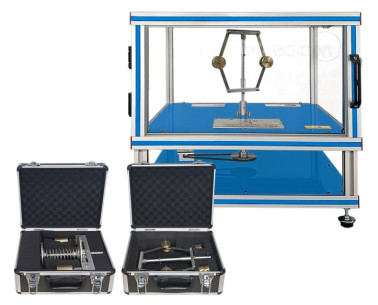
The oscillating masses can be varied by using additional weights at the piston. Each piston includes a tapped hole to allow students to add or remove weights. These weights are securely fixed during engine running.
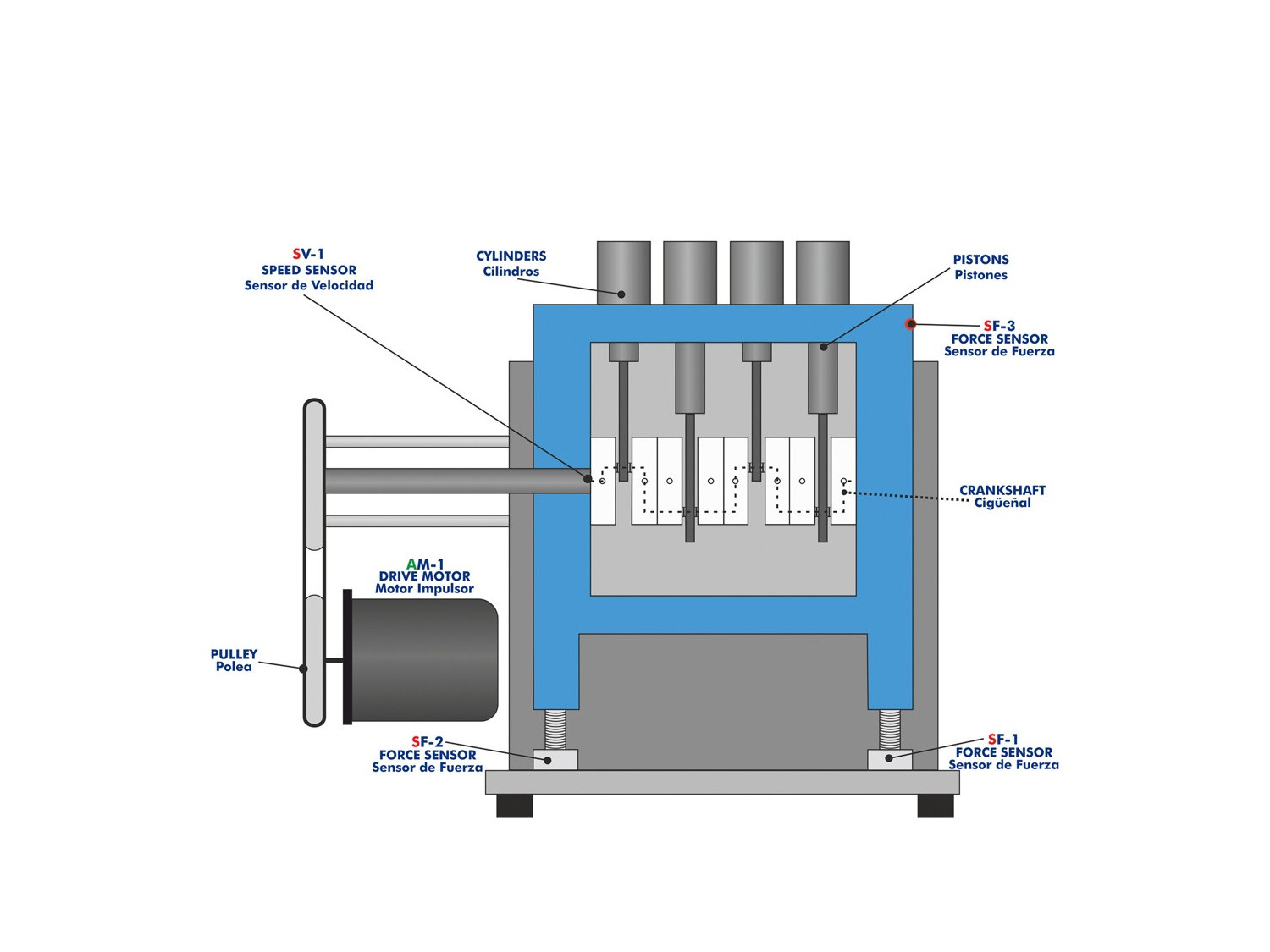
The engine crankshaft is driven by a computer controlled motor. The speed is measured by a speed sensor. The forces and moments are measured by three force sensors placed at the supports of the unit.
A transparent protective cover protects students from the moving crankshaft and allows the visibility of the practical exercises and components of the unit. This cover includes a switch, which allows automatically stops the drive motor if the cover is opened.
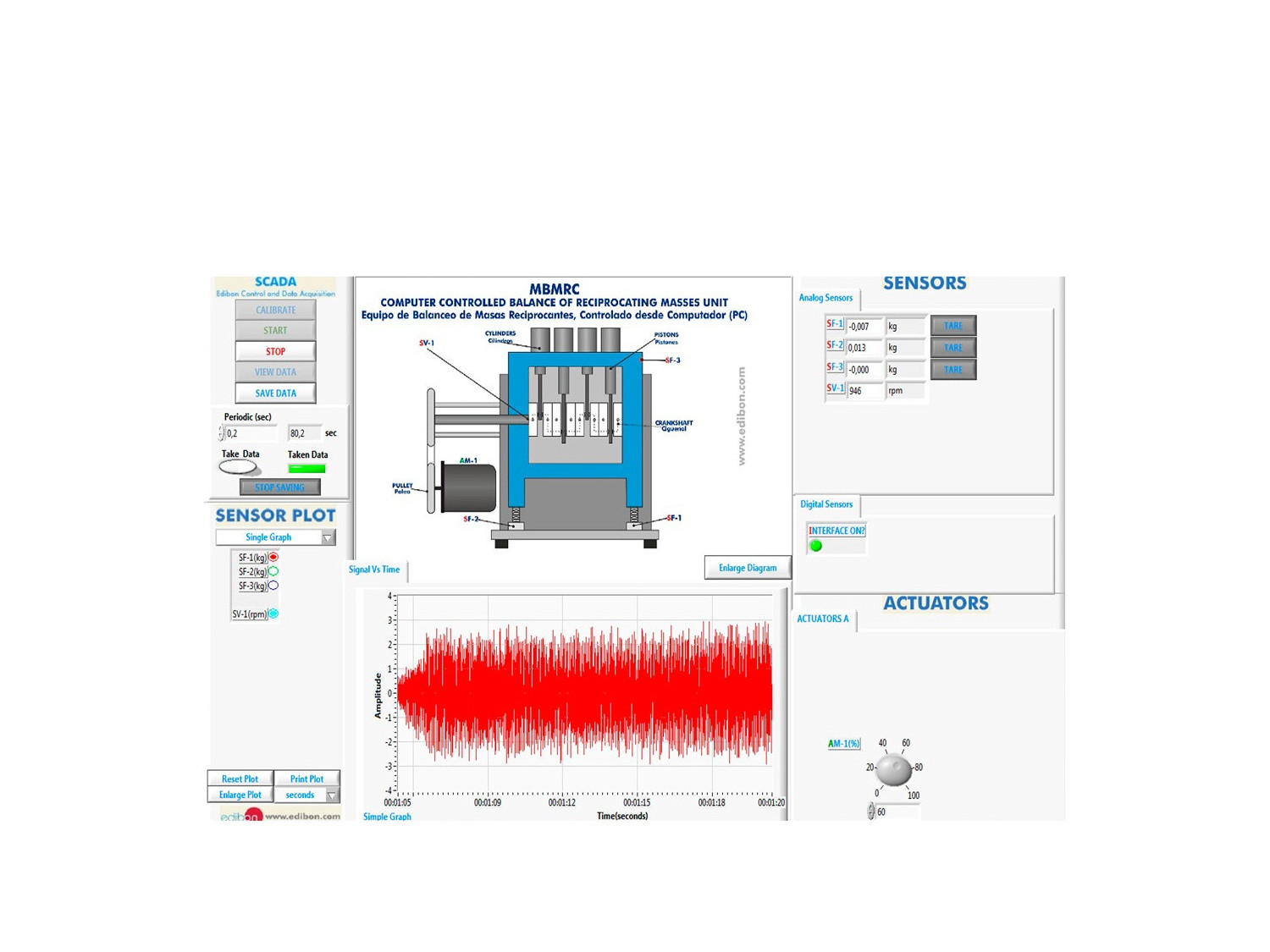
This Computer Controlled Unit is supplied with the EDIBON Computer Control System (SCADA), and includes: The unit itself + a Control Interface Box + a Data Acquisition Board + Computer Control, Data Acquisition and Data Management Software Packages, for controlling the process and all parameters involved in the process.
 クッキーの設定
クッキーの設定










 カタログ
カタログ
 コンテストの仕様
コンテストの仕様


















{kind=link}
{kind=link}
{kind=link}
{kind=link}