クッキーの設定
クッキーの設定
Your cart
カートには商品が入っていません

 カタログ
カタログ
 コンテストの仕様
コンテストの仕様













- BSUB
Available
6.1.2.1.- センサーと電子機器
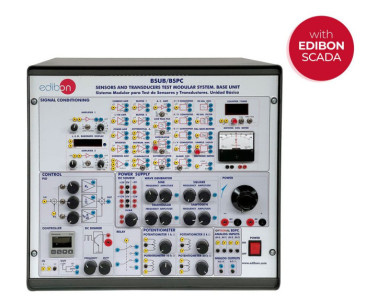
BSUB
BSの基本ユニット
The BSUB is a complete unit designed to provide signal conditioning for many sensors and transducers output signals that must be conditioned. These circuits consist of differential and instrumentation amplifiers, filters, current to voltage and...