Настройки cookie
Настройки cookie
Ваш выбор
Больше не выбранных статей

 Каталог
Каталог
 Спецификации конкурса
Спецификации конкурса






- RYC
Available
6.1.1.1.- ТЕОРЕТИЧЕСКИЕ И ПРАКТИЧЕСКИЕ ОСНОВЫ
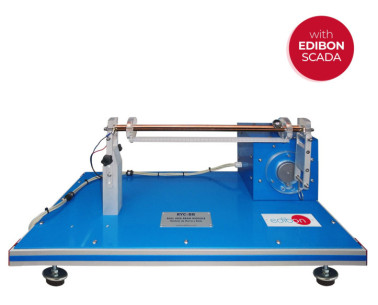
RYC
Оборудование для изучения регулирования и управления, управляемое компьютером (ПК)
Regulation and control theory is divided into two major divisions in, namely, classical and modern. The implementation of classical controller designs as compared to systems designed using modern control theory is easier and these controllers are...