 Настройки cookie
Настройки cookie
Ваш выбор
Больше не выбранных статей

 Каталог
Каталог
 Спецификации конкурса
Спецификации конкурса

- AE-SCA
Available
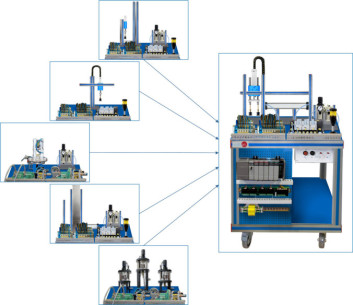
6.2.5.5.- РАБОЧЕЕ МЕСТО ДЛЯ РОБОТИЗИРОВАННЫХ ПРИЛОЖЕНИЙ
AE-SCA
Учебная станция с роботизированной рукой SCARA
The "AE-SCA" is a SCARA Arm Workstation with the programming console of the robot arm included. The "AE-SCA" also includes a PLC that commands the electrical gripper or the electrical driller.The "AE-SCA" workstation can perform a lot of functions...


