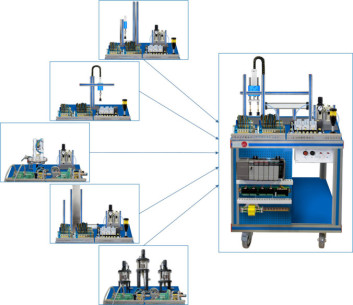
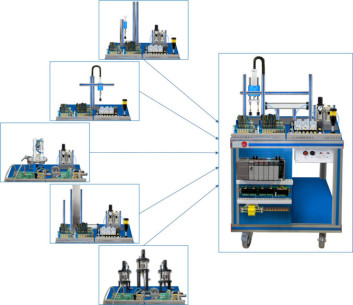
The "AE-PLC-MA" is a Multiple Pieces Feeder Workstation commanded by a PLC, which provides three different types of pieces to be assembled in one piece by the industrial robot of the "AE-BR" unit.
The "AE-PLC-MA" contains an input pieces area, an output pieces area and an assembling zone where the three pieces can be mounted in one.
The "AE-PLC-MA" workstation is designed as a modular system to facilitate the understanding of the unit. The main components are:
- The PLC: is composed by the CPU PLC unit and all the extra modules needed to perform a correct working of the workstation.
- The control panel: with start/stop button, emergency push button, reset button, light indicators to show current state of the process, etc.
- The pneumatic circuit: contains the required solenoid valves, filters and regulators to assure the correct working and safety of the unit.
- The workstation: is composed by real industrial components used by the industrial feeder systems such as limit switches, IR beam detectors, vertical storage for pieces, etc.
The "AE-PLC-MA" is designed to work with the "AE-BR" unit. The "AE-PLC-MA" is also included in several Flexible Manufacturing systems*.
*The Flexible manufacturing systems product list is available at "Flexible Manufacturing Systems (FMS)" area of the general catalogue.
 Cookies首选项
Cookies首选项

 目錄
目錄
 比赛规格
比赛规格