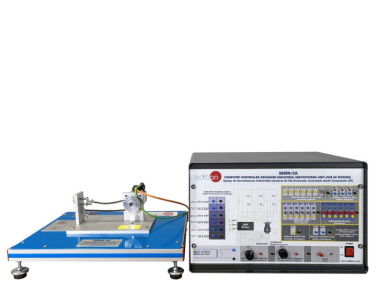
L´Unité Basique de Servo-systèmes pour Moteurs à Courant Continu, "SERIN/CCB", est une unité dont le but est l'étude des systèmes d'asservissement de faible puissance. Il s'agit d'un entraîneur de contrôle de vitesse de moteur à courant continu de faible puissance doté d'un simulateur de panne.
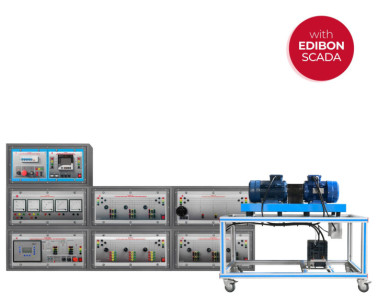
Ce formateur est une version de base du formateur avancé et informatisé Unité de Servosystèmes Industriels (Moteurs CC) Avancée, Contrôlée par Ordinateur (PC), "SERIN/CC", étant conseillé pour une étude introductive des systèmes de contrôle en boucle fermée et ouverte.
Il se compose d'une unité électromécanique avec un moteur à courant continu et un tachymètre, fixés via une roue inertielle, montés sur un boîtier en acier qui contient l'étage de puissance et la carte d'acquisition et de contrôle, ainsi que le logiciel de supervision et de contrôle.
Cet ensemble permet le contrôle en boucle ouverte et fermée, le contrôle et la génération de variable de commande, le générateur de rampe, l'amplificateur d'erreur proportionnelle et le PID, le limiteur de courant, le modulateur PWM, le contrôle d'inversion de tour, le contrôle de démarrage et d'arrêt, le contrôle de freinage et le simulateur de panne, qui permet d'introduire un grand nombre de dysfonctionnements afin que les étudiants puissent diagnostiquer la nature et la localisation du défaut, sans risquer l'intégrité du matériel.
Le contrôle de l'unité peut être effectué manuellement, sur l'unité elle-même, de manière basique ou de manière plus avancée, via le logiciel de contrôle SCADA. Ce logiciel de contrôle peut effectuer deux types de contrôle : Le contrôle en boucle ouverte et le contrôle en boucle fermée.
L'unité de base comporte quatre parties différentes, comme indiqué sur le panneau avant :
- Zone de connexion pour moteur et dynamo tachymétrique.
- Contrôle manuel ou calculé de la vitesse augmentée. Il y a un interrupteur en forme de levier pour sélectionner le type de commande.
- Zone PID. Ici, les valeurs des constantes PID peuvent être manipulées (Proportionnelle, Intégrale et Dérivée). Cette fonctionnalité n'est disponible qu'en mode PC, le levier de contrôle de vitesse doit pointer vers PC.
- Zone de contrôle de virage et d'arrêt. Permet de changer le sens de rotation et d'arrêter le moteur.
Circuits intégrés simples pour pouvoir analyser indépendamment chaque étape fonctionnelle.
Composants visibles avec connecteurs 2 mm pour la mesure de tension et de courant.
Contrôle via impulsions PWM et étage de puissance configuré avec des transistors MOSFET.
 Préférences sur les cookies
Préférences sur les cookies

 Catalogue
Catalogue
 Spécifications du Concours
Spécifications du Concours