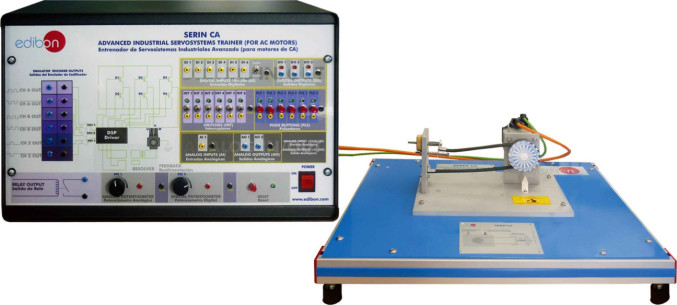
L'Unité de Servosystèmes Industriels (moteurs CC) Avancée, Contrôlée par Ordinateur (PC), "SERIN/CC", a été conçue par EDIBON pour permet de réaliser différentes pratiques liées aux servomoteurs. L'unité dispose de différents modules pour développer différentes expériences. Les modules inclus dans l'unité "SERIN/CC" sont :
- Entrées et sorties numériques : l'unité contient six entrées numériques et quatre sorties numériques. Les entrées numériques peuvent être utilisées pour déclencher différentes fonctions standard définies ainsi que des profils de mouvement définis. Les sorties numériques donnent toutes les informations nécessaires sur l'état du mouvement.
- Entrées analogiques : l'appareil dispose de deux entrées analogiques qui peuvent être activées ou désactivées à l'aide du commutateur. Elles ont une plage de tension de 0 – 5 VCC et une résolution de 10 bits.
- Moteur à CC : le moteur est relié à un frein de tension qui peut être utilisé pour charger le moteur.
L'interface est équipée d'un contrôleur de servomécanisme pour moteurs à CC qui contrôle la vitesse, la position et le courant du moteur. Un codeur d'impulsions est utilisé pour ce contrôle de rétroaction.
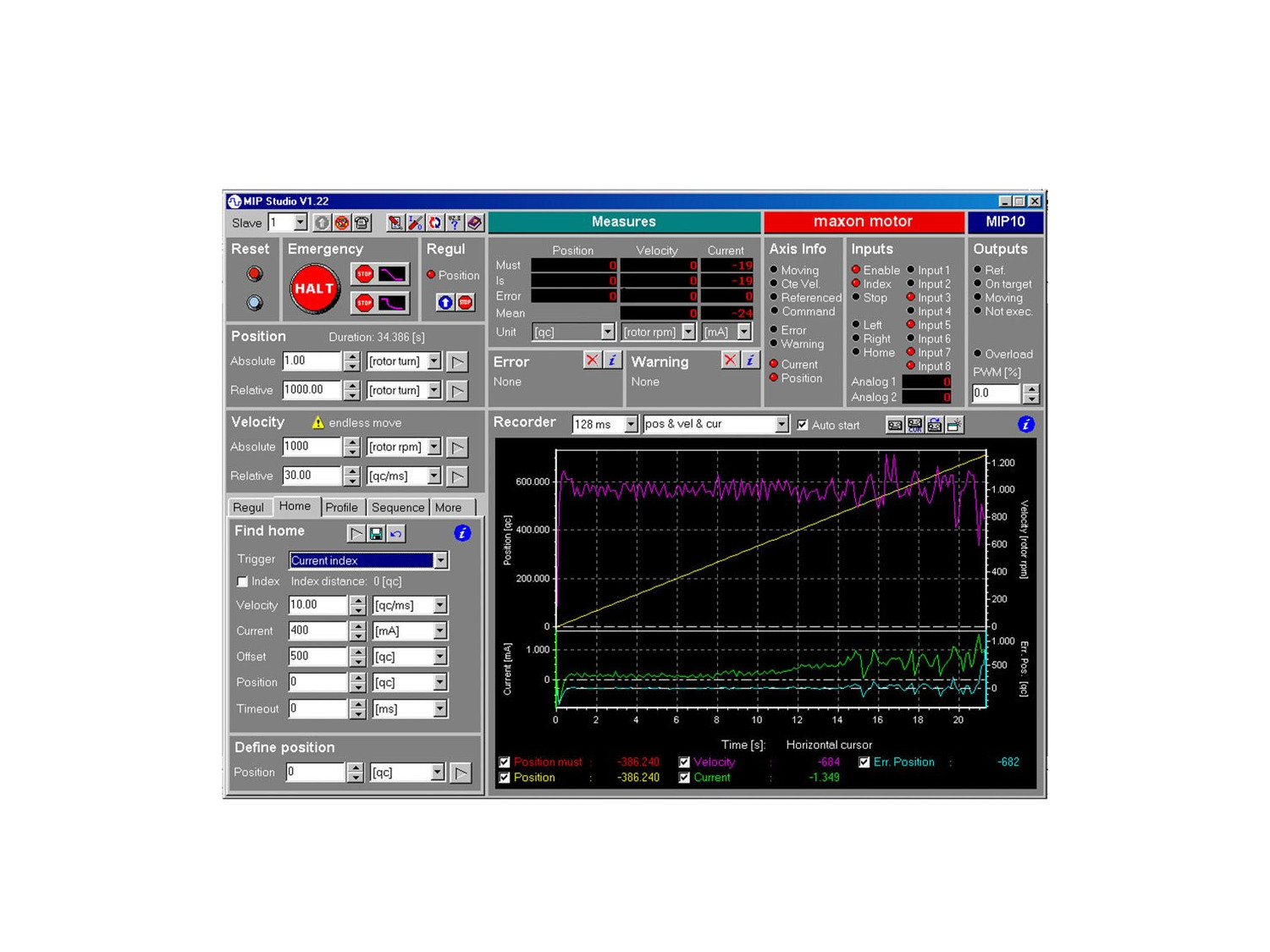
La communication RS-232 entre l'interface et l'ordinateur donne à l'unité "SERIN/CC" la possibilité de contrôler le moteur depuis l'ordinateur et d'afficher les signaux les plus importants du moteur.
Le servo-contrôleur à 4 quadrants contrôle le fonctionnement du moteur et le freinage dans le sens de rotation horaire et antihoraire pour un positionnement correct.
Le régulateur est un modulateur de largeur d'impulsion (PWM) dans lequel le régulateur allume et éteint le moteur plusieurs fois par seconde (plusieurs dizaines de milliers de fois). Si l'intervalle d'allumage est plus long, le moteur gagne en vitesse, mais si l'intervalle d'allumage est plus court, le moteur perd en vitesse. La valeur moyenne décisive de la tension change en fonction du temps d'allumage/ d'extinction dans un cycle du signal PWM. Ce type de régulation a une efficacité plus élevée et seule une quantité minimale d'énergie est convertie en chaleur.
Il existe trois types de contrôles effectués par le contrôleur :
- Contrôle de vitesse : La fonction de vitesse du servoamplificateur est de maintenir une vitesse de rotation du moteur constante, indépendamment des variations de charge. Pour cela, la valeur de consigne (vitesse de rotation souhaitée) est comparée en permanence à la valeur réelle (vitesse de rotation réelle) dans la commande électronique du servomécanisme de l'amplificateur. La différence de régulation ainsi déterminée est utilisée par le régulateur pour réguler la largeur d'impulsion du servoamplificateur de manière à ce que le moteur réduise la différence de régulation. Il s'agit d'un circuit de régulation de vitesse en boucle fermée.
- Contrôle de position : Le contrôle de position garantit que la position obtenue à partir de la mesure du courant correspond à la position cible en fournissant au moteur les valeurs de correction correspondantes, tout comme le fait le régulateur de vitesse. Cette position est généralement obtenue à partir d'un codeur numérique.
- Contrôle du courant ou du couple : Le contrôle du courant fournit au moteur un courant proportionnel à la valeur de consigne. Le couple moteur change donc proportionnellement à la valeur de consigne. Le contrôle du courant améliore également la dynamique d'un circuit de positionnement ou de contrôle de vitesse prioritaire.
Le moteur est équipé d'un codeur numérique fournissant 500 impulsions par tour. Le sens de rotation est détecté à l'aide des impulsions carrées des canaux A et B grâce à un décalage électrique de 90 degrés.
Le codeur numérique est utilisé dans le contrôle de position pour dériver et mesurer le déplacement ou l'angle.
Le codeur fournit un signal carré simple pour le traitement ultérieur du système de commande. Ses impulsions peuvent être comptées pour un positionnement exact ou une détermination de la vitesse. Les canaux A et B génèrent des signaux déphasés, qui sont comparés pour déterminer le sens de rotation.
L'impulsion dite "home" (canal I) fournit un passage à zéro et sert de point de référence pour déterminer précisément l'angle de rotation.
Le codeur de l'unité "SERIN/CC" évalue les fronts montants et descendants du signal. Compte tenu du nombre d'impulsions du codeur, ce résultat permet un positionnement quatre fois plus précis.
 Préférences sur les cookies
Préférences sur les cookies
 - SERIN/CC")
 - SERIN/CC")
 - SERIN/CC")
 - SERIN/CC")
 - SERIN/CC")
 - SERIN/CC")
 Catalogue
Catalogue
 Spécifications du Concours
Spécifications du Concours












 - SERIN/CC")
{kind=link}
{kind=link}