 Cookies首选项
Cookies首选项
Your cart
There are no more items in your cart

 目錄
目錄
 比赛规格
比赛规格

- AE-SCA
Available
6.2.5.5.- 机器人工作站应用
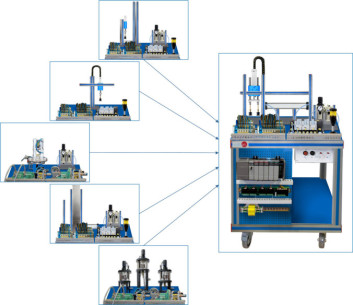
AE-SCA
SCARA机器人手臂工作站
The "AE-SCA" is a SCARA Arm Workstation with the programming console of the robot arm included. The "AE-SCA" also includes a PLC that commands the electrical gripper or the electrical driller.The "AE-SCA" workstation can perform a lot of functions...


